@koliver wrote:
I read the log and found that RCOUT is abnormal.but I did not know the reason.



Posts: 1
Participants: 1
@koliver wrote:
I read the log and found that RCOUT is abnormal.but I did not know the reason.
Posts: 1
Participants: 1
@iSkyMaster wrote:
I am connected to my PixHawk and I am unable to a find a number of parameters under “Advance Paramters”, or “Full Paramter List”?
My firmware is Ardu Plane.
paramters I am looking for are such as;
- OSD4_
- PLND_ENABLED
ArduPilot doc shows all of them. What am I do wrong “or” am I searching at the wrong place?
Posts: 4
Participants: 2
@HAESOLKIM wrote:
Hello,
I try to make indoor drone with two lidar(first lidar is downward for altitude and optical flow, second one for forward(or 360 lidar) to avoidance). However, The two motors was burned and motor output log was fluctuating bottom to top. Copter Specification is below.
FC : pixhawk 2(v3.6.7)
ESC : AK32 4in1 55A (2S-6S)
MOTOR : [X-nova] 2208-1900kv Lightning V2N
PROP : [GEMFAN] Hurricane 51433
BATT : [Dinogy] 1600mAh 6S 130C Platinum Graphene-2.01 1980-01-01 오전 9-00-00.bin.zip (545.9 KB)
1 1980-01-01 오전 9-00-00.bin.log.param (14.0 KB)
using basic damper(blue) for FC, finished basic tune page in Docs.
Each Motor has plastic damper.
drone fly okay but it twitch a little bit.
and why is acro mode try get level attitude??? (Seems like slow stablize mode)Next Step
INS_HNTCH_
INS_NOTCH_
INS_ACCEL_FILTER
INS_GYRO_FILTER
SCHED_LOOP_RATE
ATC_RAT_XXX_FFWhat can I do? Now I cant try longer cause of burned motor. I bought same motors.
Please advice me about this.
Thank you for taking time for this.
Posts: 1
Participants: 1
@bull wrote:
Hi All
I was flying with the SET_POSITION_TARGET_GLOBAL_INT command.
And I want to stop flying.
So, I used DO_PAUSE_CONTINUE. (All parameters are 0)
However, the flight does not stop.
SET_POSITION_TARGET_GLOBAL_INT Code
MAVLink.mavlink_set_position_target_global_int_t setPosition = new MAVLink.mavlink_set_position_target_global_int_t(); setPosition.target_system = (byte)sysid; setPosition.target_component = (byte)compid; setPosition.time_boot_ms = 0; setPosition.lat_int = (int)(x * 10000000L); //lat setPosition.lon_int = (int)(y * 10000000L); //lon setPosition.alt = z; //high m setPosition.vx = 0; setPosition.vy = 0; setPosition.vz = 0; setPosition.afx = 0; setPosition.afy = 0; setPosition.afz = 0; setPosition.yaw = 0; setPosition.yaw_rate = 0; setPosition.type_mask = 0b0000111111111000;// (ushort)(MAVLink.POSITION_TARGET_TYPEMASK.X_IGNORE| MAVLink.POSITION_TARGET_TYPEMASK.Y_IGNORE| MAVLink.POSITION_TARGET_TYPEMASK.VX_IGNORE | MAVLink.POSITION_TARGET_TYPEMASK.VY_IGNORE); setPosition.coordinate_frame = (byte)MAVLink.MAV_FRAME.GLOBAL;
DO_PAUSE_CONTINUE Code
MAVLink.mavlink_command_long_t req = new MAVLink.mavlink_command_long_t(); req.target_system = sysid; req.target_component = compid; req.command = (ushort)MAVLink.MAV_CMD.DO_PAUSE_CONTINUE; req.param1 = 0; req.param2 = 0; req.param3 = 0; req.param4 = 0; req.param5 = 0; req.param6 = 0; req.param7 = 0;
I want to stop flying.
Please tell me how.Thank you all.
Posts: 4
Participants: 2
@gnitzan wrote:
Hi, I have noticed that when I fly fast in PosHold, copter keeps on going for about 10-15 meters when I let the stick jump to middle and I am sure I did not see the copter leaning 30deg to break. In Loiter it stops on almost instantaneously (I know loiter speed much slower).
My current parameters which I believe to be the default:
PHLD_BRAKE_ANGLE=3000
PHLD_BRAKE_RATE=8What is the best way to go with this?
Thanks, Gal
Posts: 1
Participants: 1
@Moksh wrote:
Hello everyone I want to know more about circle mode , i know there is exist circle rate but i don’t have PC and laptop so all time I’m pushing in mobile app QGC. There is exits only circle radius and circle rate , many experiment i get it when circle distance 10m then circle degree is ~70° but after many experiment i fond it 74° is best.
QGC Advance -> circle -> circle rate (i think channel define) , i also define channel for circle change rate but not working also change roll and pitch not work.
Need :- i want to need my copter current position to select area and trigger circle and bhoooom. Like this

Thank you
Posts: 1
Participants: 1
@robertocopter wrote:
Hello,
I have just finished building my first drone. It lifts off ok and seen to be stable ( I use stabalise mode). However after a few minutes in the air it is not controlable anymore and starts to make circles. By pulling the throttle down I was able to save my drone.
I have looked in the logs and think I see some “strange” behaviour in RCin RCout (especially motor 3)
Can one of the more experienced drone pilots help me out and analyze my log?
Posts: 7
Participants: 3
@Great_Galaxy wrote:
Hi guys
I collected a range of data from my measurements and there is a param called OH that I am totally unfamiliar with. Is there anyone who can help explain it?
Posts: 1
Participants: 1
@Corrado_Steri wrote:
I updated one of my machines today to latest 4.0.3 stable release. Everything went well and it flew good. Didn’t touch anything upgrading from 3.9.11.
Finally i was able to put a drotek RM3100 compass to work, i calibrted it and it was successful with very low off sets. Right after calibration i went to mission planner tuning and selected mx, my and mz , to look at how the axis where moving during rotations. I noticed i have a BIG interaction between axis. If for example i rotate the copter on the table i see 2 axis moving by about the same amount, while i was expecting that each axis would have moved on the screen only when the drone was rotated along that axiz. Basically what i see is interaction. I than test flew it and it did pretty well in flight (loiter rock solid with no sign of toilet bowl) but EKF for compass was all over the place.
I have authomatic correction and fix of axis enabled, could it be it doing some strange things? Tomorrow i’ll try an inflight calibration and see if it gets better.Any help would be greatly appreciated.
Posts: 1
Participants: 1
@Moksh wrote:
Hello everyone, i have some new features like dji spark mode (i think) , this feature work on open tx ,
I’m using jumper t-16.This is video about how it’s work.
This is a .Bin radio model. All sefty is enable like RTL.
Pixhawk-RTL.bin (9.5 KB)
This is a some photos about model
“Now I would like to this feature with circle , anybody make it ???”
And this is safe or not ?
Thank you
Posts: 1
Participants: 1
@vyoufinder wrote:
I am unsure if I have my compass settings correct, and for the life of me, I haven’t been able to understand how all the settings are working together, or if in fact they are. Particularly, if my external (addon) compasses are being used or not, and in which order.
When I installed ProfiCNC Hex Board with Orange Cube, I also installed two additional compases; a NEO-M8N GPS module with compass, and 3DR GPS and compass that came with my original Pixhawk1. The NEO-M8N is plugged into the GPS1 port on the Hex Board, and the 3DR is plugged into the GPS2 port of the Hex Board.
I’ve searched my .params for COMPASS_DEV_ID, and I show three compasses, but I think those are the internal compasses. In other words, these are physically located inside my Orange Cube? - is this correct?
Then I show two External compases; COMPASS_EXTERNAL & COMPASS_EXTERN2
These, I think are my external compasses I added - right?Where it gets strange to me is when I physically disconnect the two additional, externally mounted GPS/Compass units I added, COMPASS_DEV_ID2 & COMPASS_DEV_ID3 get “removed” (value changes from “1” to “0”) and COMPASS_EXTERN2 remains (value is still “1”).
On the “Compass” page of Mission Planner looks like:
SO to me anyway, this looks like after disconnecting the two gps/compass units I added, I have two compasses, one as COMPASS_DEV_ID & one as COMPASS_EXTERNAL, but then on the “Compass” page in Mission Planner, it still shows three, which further confuses my understanding of what is going on.
Can anyone explain how this is working to me? I’ve searched and read about the compass .params quite a bit, but it’s just not making clear sense to me.
Then the real question I have, which got me started into this: My parameter, COMPASS_TYPEMASK is set to “32”. When I looked up this parameter in the Complete Parameters List, I see:
COMPASS_TYPEMASK: Compass disable driver type mask
Note: This parameter is for advanced users
This is a bitmask of driver types to disable. If a driver type is set in this mask then that driver will not try to find a sensor at startupI’ve also searched the forums quite a bit about this, but I don’t understand what “32” is disabling, if anything. Basically, is this right?
Posts: 3
Participants: 2
@Corrado_Steri wrote:
Is support for RPlidar S1 in latest 4.0.3?
I need to start testing on obstacle avoidance hardware and the new rplidar s1 looks good, small and lightweight.
Posts: 1
Participants: 1
@MadRC wrote:
Hi guys, I’m starting to play with some of the lua scripts and was trying the REPL however I cant get it to start, im just getting REPl Failed to start .
This is Cube Orange on Copter V4.0.3 and scripting is enabled.
I’m connecting via USB as well to the controller
Posts: 1
Participants: 1
@ZECPLUZ wrote:
Is it possible to use a normal switch (on/off) instead of the usual safety switches? How do I have to wire the switch then? What do I have to change in Mission Planner?
Posts: 1
Participants: 1
@vyoufinder wrote:
Is there a way to disable RCx input when disarmed? I want to disable RC9, which is my landing gear, unless the copter is armed.
Posts: 1
Participants: 1
@vyoufinder wrote:
Setting up my ProfiCNC Hex Board with Orange Cube, when I do a search on my Full Parameters List, I am not finding:
AVD_W_ACTION
AVD_F_ACTION
AVD_F_RCVRYAre these features implemented yet? Should I be asking this in the Mission Planner forum instead, since I am using that?
Posts: 1
Participants: 1
@Ricoman wrote:
Hello everybody.
The man flying my helicopter this time experienced a sudden engine shutdown.
As a result of the inspection, it was confirmed that the connecting rod was damaged.
I am not sure what is first.
Confuse whether the connecting rod is broken and the engine is stopped, or if the engine is stopped and the connecting rod is broken.
What factors cause the connecting rod to break?
Posts: 1
Participants: 1
@Anthony_Leung wrote:
Hi,
It’s my first time posting on this forum so please correct me if I am not following the community guidelines.
At the moment i’m working on a Thesis project for uni and I am in need for dataflash logs about power.
I’m lacking the tools to record this data myself and limited by the restrictions of COVID-19. I was wondering if anyone could provide some of their old .bin files that has data on CURR (and any other features) recorded for me to work on?
I am trying to implement a machine learning algorithm to better work on power management. Happy to show you if you ask!
Thanks.
Posts: 1
Participants: 1
@iSkyMaster wrote:
I am curious what people are using for 80+AMP multiple ESC setup hexa copters, planes etc. for power distribution from 4S to 6S or even 8S.
Most products I see are rated for very low current, mostly because they are PCB board designs. See examples below.
Then we have This. As its a passive design I think it can handle fairly large amount of current draw.
This company claims it can support 250A
This company claims 300A support
here is another, passive design.
Posts: 1
Participants: 1
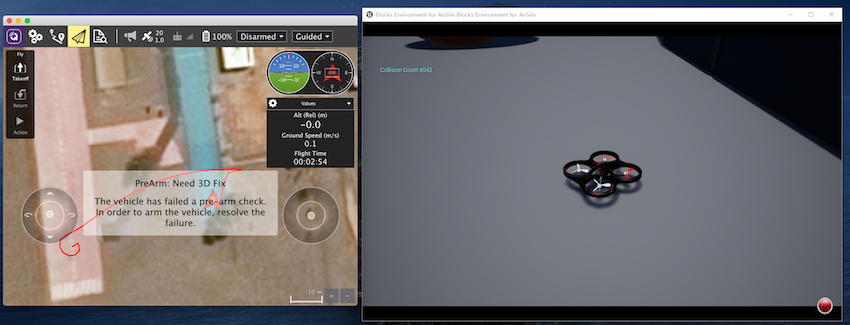
@Huibean wrote:
I am testing indoor positioning in ArduCopter, when using positioning system like UWB,there is not yaw data, and it’s not stable using compass indoor, so it seems possible to use original IMU heading as north and input xyz via fake gps
First Testing in SITL with Airsim
params change, still use compass
- EK3_ENABLE=1
- EK2_ENABLE=0
- AHRS_EKF_TYPE=3
- EK3_GPS_TYPE=0
- EK3_ALT_SOURCE=2
- GPS_TYPE=14
- GPS_DELAY_MS=50
Then drone can hover for 1 minute, then make a circle and crash, maybe the compass offset problem?
log link https://drive.google.com/open?id=1sYlc6kLVrT2E_rLW_zkU5bzcw0LftKHF
disable compass
- COMPASS_USE=0
- COMPASS_USE2=0
- COMPASS_USE3=0
- EK3_MAG_CAL=5
Now it always show Need 3D fix that I can not arm the drone, what should I do to fix this?
log link https://drive.google.com/open?id=1Yr14ZuDEyh_cH18Zxsj5-fQVjs3oF90C
Posts: 1
Participants: 1